Fixed as of:
Servo inverter i950 FW: from V01.15.xx andV02.00.xx (planned)
Behavior of the new version:
Description of behavior:
The characteristic of position 0x500B/E:10 and speed 0x500B/E:11 of the Encoder_Axis are unexpectedly noisy. The position extrapolation depending on the parameterized Update time SSI Encoder 0x500B/E:69 does not work as expected.
This triggers a following error or position sensor-related safety monitoring response.
This mainly affects applications with linear SSI absolute encoders, which are frequently used in stacker crane applications.
Conditions under which the behavior occurs:
- An SSI absolute encoder is evaluated as Application Feedback B
- The update time SSI encoder is parameterized greater than 0x500B/E:69 = 0 ms
Affected products:
Servo inverter i950 FW V01.14.00 (library L_MC1P_MotionControlBasic V3.33.0.92)
Short-term measure, recommendations: - Update time SSI encoder Leave 0x500B/E:69 = 0ms (default).
- Or use servo inverter i950 FW V01.13.00
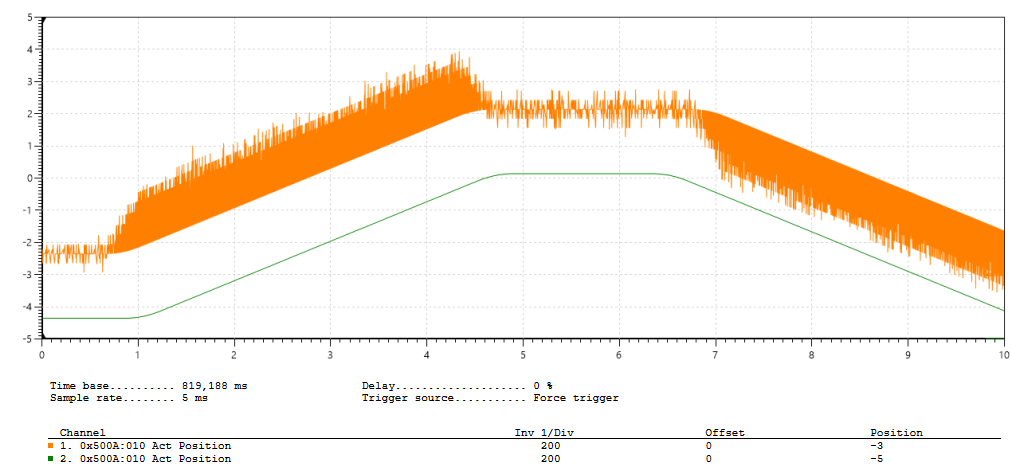
The fact that unexpected noise in the SSI encoder actual values is caused by the restriction described above can best be demonstrated by an oscilloscope recording of the position (subindex: 10). If its curve with 0x500B/E:69 > 0ms shows the characteristic curve with position jumps in the oscilloscope recording, then the limitation described above is effective.
Channel 1 orange: 0x500B/E:69 > 0ms
Channel 2 green: 0x500B/E:69 = 0ms
Assessment:In the scenario of a device replacement during servicing, there is a risk that the monitoring responses will prevent the servo inverter and thus the machine from restarting. Even during series commissioning, it is noticeable that reliable operation is not possible with the standard parameterization. The root cause analysis is complex.
With0x500B/E:69 = 0ms, the restriction no longer applies, but the actual feature of position extrapolation cannot be used either. If this is necessary, downgrading the firmware to V1.13 should be preferred as an immediate measure.
