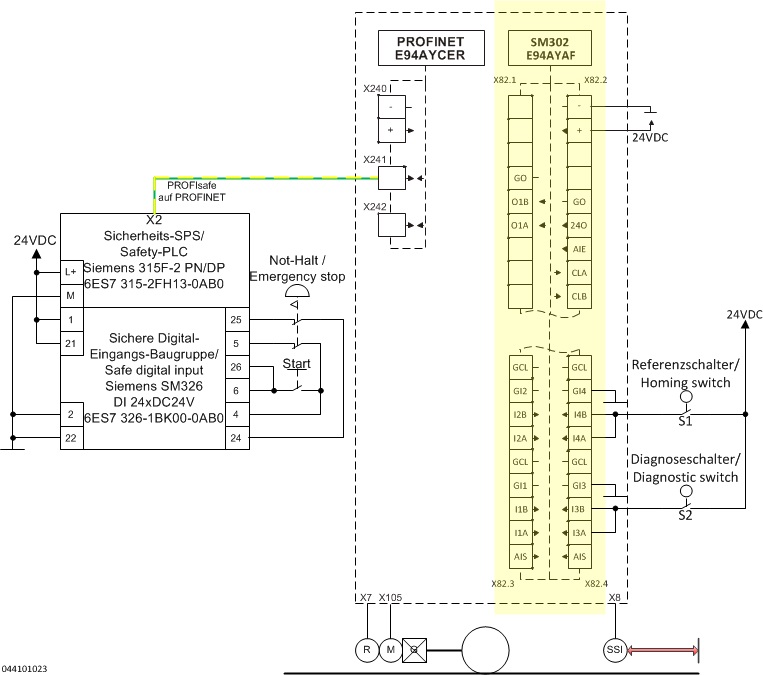
Function:
Emergency-stop: When the emergency stop button at the safe inputs of the safety PLC is actuated, safe stop 1 is activated with a braking time of 1 500 ms. The trend of the deceleration ramp is monitored by the SM302. When the reset / start button at the safe inputs of the safety PLC is actuated, the emergency stop and any errors are acknowledged.
Normalization of the position values: By means of an appropriate parameterization of the position encoder gearbox factor and the gearbox factor in the SM302, the absolute position values in the SM302 are provided with a scaling factor of 100, i.e. 1 unit (mm) = 100 incr. The procedure is described in the AKB article 201700233
Homing: After switching on the system, the motion application need not be homed because an absolute position measuring system is used. Safe homing happens on the position switch S1 in the negative direction. Subsequently, the position switch is left in the positive direction again. As long as the safe home position is not available in the SM302, it is only possible to move with SLS1 (= 1000 mm / s) and in the negative direction. Safe homing is started on the position switch S1 in the negative direction. The safe home position is set when leaving the position switch in the positive direction. The motor is moved in the inhibited direction within the tolerance window of the SDI function (max 32768 inc. = 50 mm).
The homing movement happens via two positioning profiles. The safe home position is stored retain, so that only the mini homing run is performed when switching on. If the vehicle is moved in the de-energized state more than the tolerated window of 1 000 inc. (= 10 mm), this is detected at power up. Then a homing movement is required.
Safe position monitoring: As soon as the safe home position is available, the PDSS function is auto-matically enabled. SCS can be used in the end areas of the movement area.
Motion function: In automatic mode, the vehicle positions between 3 200 mm (= 320 000 inc.) and 80 800 mm (= 8 080 000 inc.) at 4 000 mm / s (= 2 400 rpm). The acceleration and deceleration is 2 000 mm / s2 (= 1 200 rpm / s). In normal operation, it is not positioned into the SCS areas. The SCS areas can be travelled on with 150 mm / s (= 90 rpm) in Manual Jog.
General: Occurring slip of max. 10 mm per motor revolution (= 1 000 Ink.) is also compensated in the end areas. Therefore, the tolerance for the position comparison is also parameterized to 1 000 inc. By means of the two diagnostic marks, which actuate the position switch S2, the correct position value of the SSI encoder is checked before the vehicle enters the end areas of the movement area. The diagnostic marks have a width of 50 mm each. This results in an operating time of 12 ms at maximum speed (4167 mm / s). This time is long enough for certain detection. The centers of homing switch S1 and diagnostic switch S2 each mark the point of the current position value. Any offset must be specified in the SSI encoder or the 9400-TA.
Safety information / disclaimer
The safety application and parameterisation notes are examples of possible subfunctions in machines.The T10D value according to DIN EN ISO 13849-1, Annex C.4.2 is only indicated if a B10D value is available and the operating time is less than 20 years. Commissioning is prohibited until the machine has been checked in accordance with the regulations set out in the relevant EU directives / national laws. The safety instructions contained in the technical documentation must be observed. Using the examples does not exempt the user from careful project planning. For possible damages and consequential damages Lenze assumes no liability to the extent permitted by law. Copyright 2019 Lenze Automation GmbH