Corrected from:
9400 HighLine firmware version 12.00.18.00
9400 Servo PLC firmware version 06.00.18.00
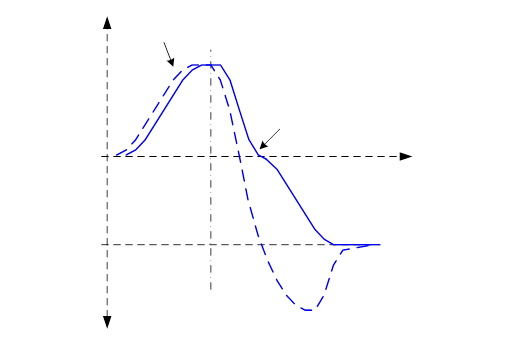
Response of the new version: In case of a profile transition due to a change of direction, the available acceleration during speed zero crossing is now reduced with the biggest jerk of the two profiles involved. In this way, an excessive speed is effectively prevented and the parameterised jerk of manual jog is not exceeded.
When does the problem occur?
The response occurs if the following conditions are met at the same time:
· Manual jog S-ramp time C2624>0ms
· During the movement, a change of the direction of rotation is requested.
· If there is a change from the positive to the negative direction, the ratio of the parameters "deceleration/acceleration" > 2
OR
If there is a change from the negative to the positive direction, the ratio of the parameters "acceleration/deceleration" > 2
The following factors increase the magnitude of the excess speed:
- Small jerk resulting from the parameters "acceleration" and "S-ramp time".
The excess results from the reduction of a deceleration. With a long S-ramp time, the reduction takes correspondingly long.
- Great ratios between acceleration and deceleration.
- Low manual jog speeds
Like this, correspondingly little time for the reduction of the deceleration is provided, and it becomes more likely that the target speed is exceeded and that the excess will have a higher percentage value.
Up to FW version 9.x for the 9400 HighLine and 4.x for the 9400 Servo PLC, the response has been covered by a functional restriction. This means that the excess speed can occur directly after a device replacement with a FW upgrade.
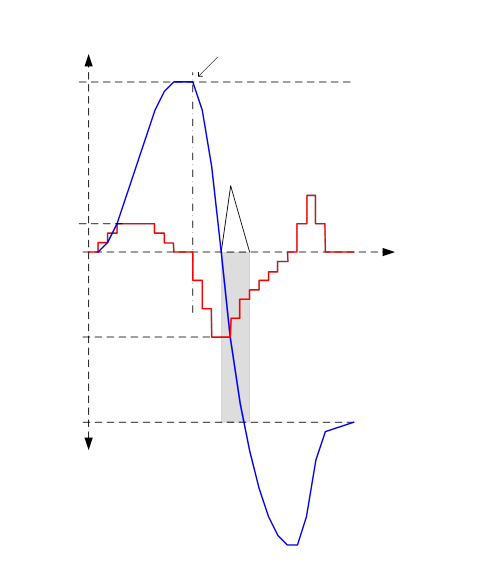
Example:After the change of direction from positive to negative, the setpoint deceleration is at first established with the ratio deceleration/S-ramp time until zero speed is reached. Then the deceleration is reduced again with a ratio of 2x acceleration/S-ramp time (period of 2x jerkup) until the actual manual speed is exceeded. Then the jerk resulting from the acceleration parameters "acceleration/S-ramp" time takes effect. After the next zero crossing of the speed, the deceleration parameters take effect again.
Diagnostics options?
If an excess speed is observed, an S-ramp time tjerk=0ms should be parameterised for testing purposes. If this measure avoids the excess, the reduction of the deceleration was the cause of the excess speed.
Short-term measures/recommendations? With an activation of the 'Manual jog with step limitation' function by MAN_bStepMode=TRUE it can be ensured that, if a change of direction is requested, traversing to standstill is executed first. Only then a new direction request is accepted. Like this, the response does not occur anymore. With the setting C2625=214748.3647units/s, nevertheless a manual jog movement without a step limitation across the entire traversing range can be executed.
Evaluation:
The excess speed is not expected for manual jog with a change of direction. Depending on the intensity of the response, the drive may run considerably faster than is set in the manual jog parameter. In the worst case, the speed setpoint limitation C909/1+2 in the speed controller (default +/-175% of C011) takes effect. The response occurs in the case of usual settings of the manual jog parameters.
