FB 'MC_TrackConveyorBelt' or TM 'L_TT1P_TrackPickAndPlace':
In conveyor tracking, the setpoint for the picker axis is formed from two superimposed components:
- Setpoint component: Interpolated movement of the picker axis (FB MC_Move).
- Tracking component: Movement of the conveyor belt
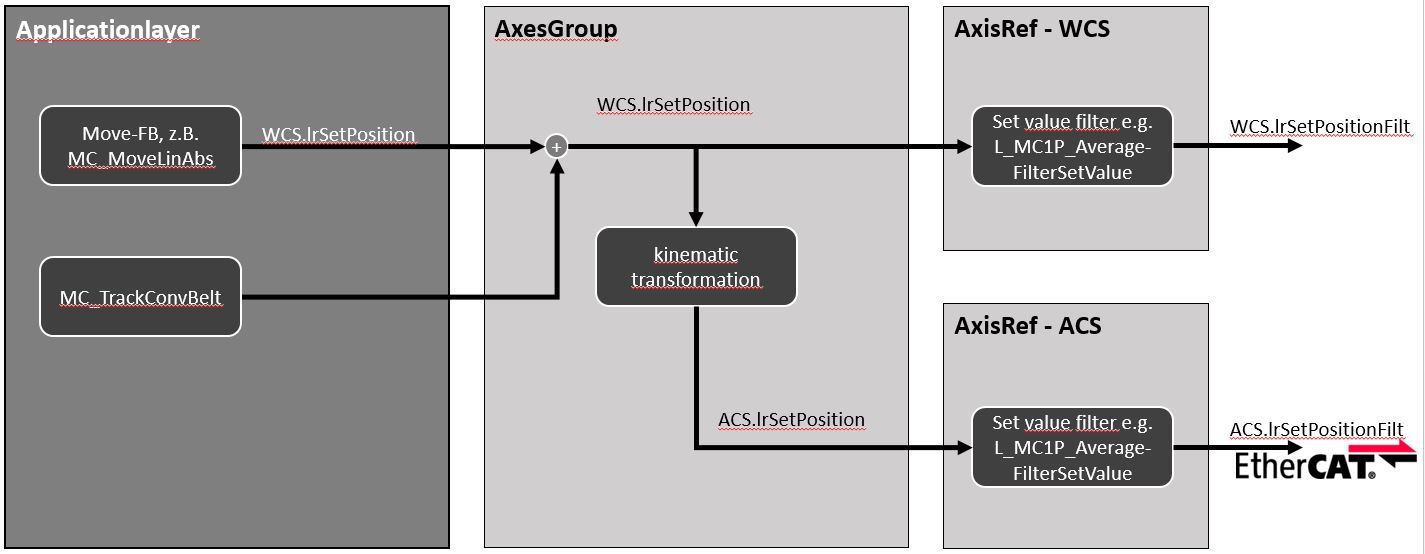
(so far) L_MC4P up to V03.21.00:
- Variables Axis_X/Y/Z.lrSetPosition / -Velocity / -Acceleration contain the sum of both components.
Depending on when the variable is accessed, it initially contains only the interpolated setpoint component and at the end both components.
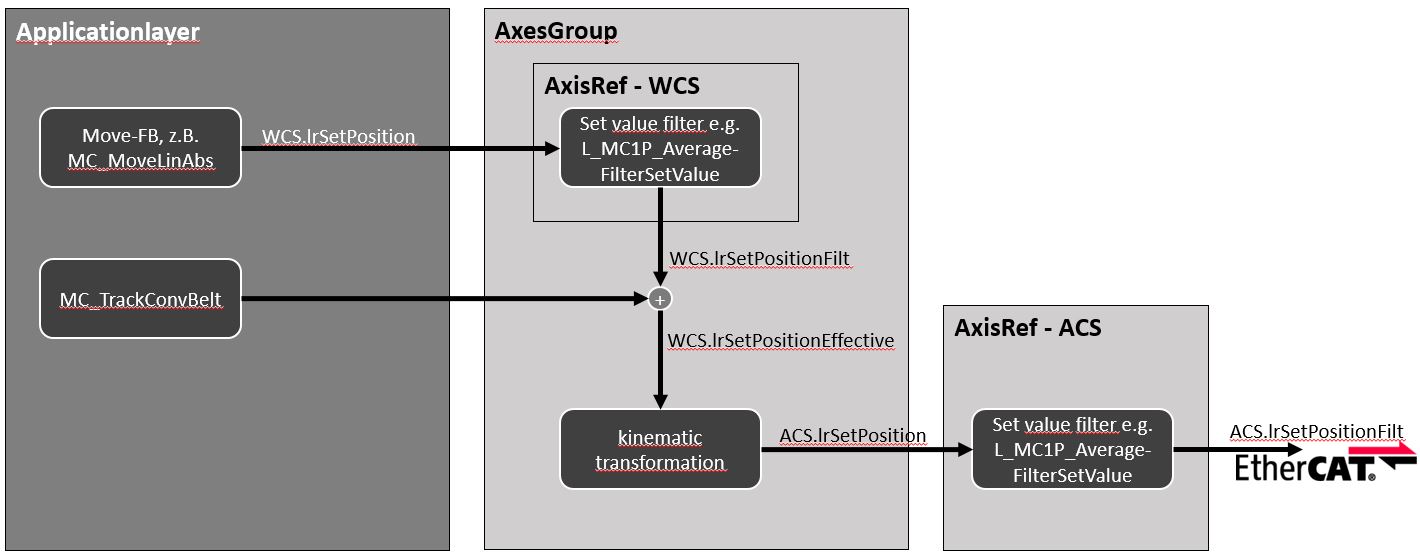
(new) signal flow L_MC4P from V03.22.00 :
Additional variables for the "Effective" values have been added, which take over the function of the previously existing variables and are to be used in their place.
For compatibility reasons, the previously used variables are still present, but with a different function:
- Variables Axis_X/Y/Z.lrSetPosition / -Velocity / -Acceleration now only contain the set values of the interpolator WITHOUT a superimposed tracking component.
- Variables Axis_X/Y/Z.lrSetPositionEffective / -VelocityEffective / -AccelerationEffective now always contain the setpoints WITH superimposed tracking component.
The variables can be read via the axis group:
<AxesGroup>.pAxis_X/Y/Z^.lrSetPositionEffective / -VelocityEffective / -AccelerationEffective.
Via the signal flow diagrams it is evident that in the implementation up to V03.21.00, the setpoint filters on Cartesian WCS axes had no effect on the actual movement performed.
