L_MC4P Conveyor-Tracking: Zugriff auf die kartesischen Sollwerte zur Einbindung eines Average-Filters (ab V03.22.00)
Funktions-Erweiterung:
FB 'MC_TrackConveyorBelt' oder TM 'L_TT1P_TrackPickAndPlace':
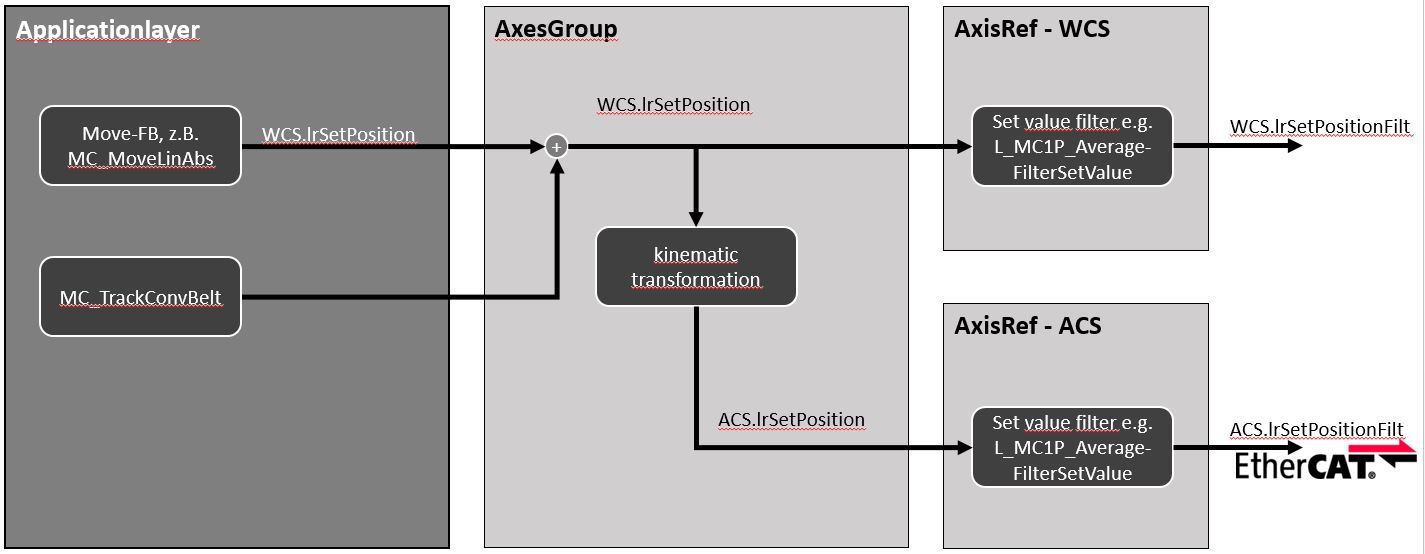
Beim Conveyor-Tracking wird der Sollwert für die Picker-Achse aus zwei überlagerten Komponenten gebildet:
Sollwert-Komponente: Interpolierte Bewegung der Picker-Achse (FB MC_Move)
Tracking-Komponente: Bewegung des Förderbandes
(Bisher) Signalfluss L_MC4P bis V03.21.00:
Variablen Axis_X/Y/Z.lrSetPosition / -Velocity / -Acceleration enthalten die Summe beider Komponenten. Abhängig vom Zeitpunkt des Zugriffs auf die Variable enthält diese zunächst nur die interpolierte Sollwert-Komponente und am Ende beide Komponenten.
(Neu) Signalfluss L_MC4P ab V03.22.00:
Es sind zusätzliche Variablen für die "Effective"-Werte hinzugekommen, die die Funktion der vorher vorhandenen Variablen übernehmen und an deren Stelle zu verwenden sind.
Aus Kompatibilitätsgründen sind die vorher verwendeten Variablen weiterhin vorhanden, jedoch mit anderer Funktion:
Variablen Axis_X/Y/Z.lrSetPosition / -Velocity / -Acceleration enthalten jetzt nur die Sollwerte des Interpolators OHNE überlagerte Tracking-Komponente.
Variablen Axis_X/Y/Z.lrSetPositionEffective / -VelocityEffective / -AccelerationEffective enthalten jetzt immer die Sollwerte MIT überlagerter Tracking-Komponente.
Anhand der Signalflüsse ist ersichtlich, dass in der Implementierung bis zu V03.21.00 die Sollwertfilter auf kartesischen WCS-Achsen keine Wirkung auf die tatsächlich durchgeführte Bewegung hatten.
Enthalten in welchen Produkten? Bibliothek: L_MC4P_RoboticHandling (FAST Motion) ab V03.22.00.157 (Update über Package-Manager)
Anwendung:
ConveyorTracking mit FB MC_TrackConveyorBelt oder Technologiemodul L_TT1P_TrackPickAndPlace.
Hinweis:
Bei Verwendung der neuen Versionen ab V03.22.00 sind die "Effective"-Variablen zu verwenden: