Corrected from:
i950 servo inverter from V01.01.03.965
Response of the new version:
During communication with the SSI encoder a monoflop time (pause between 2 transmission cycles) has to be considered. In order to meet this condition in connection with the 62.5µs task cycle, you cannot use any bit rate. The attached Excel tool can be used to calculate the permissible bit rate range to be parameterised.
As of i950 FW V01.07.04, the pause time can be parameterised directly, so the calculation of permissible bit rates is no longer necessary.
What happens?
The actual position and velocity values of the SSI encoder are not updated, as expected, if certain baud rate values are parameterised.
When using the SSI encoder as a motor encoder (left encoder module):
When using the SSI encoder as a position or master encoder (right encoder module):
This behaviour has e.g. been observed with the LEUZE SSI linear encoder AMS 304i with a parameterised baud rate of Bit rate 0x2C4A:1 = 150 kbps.
When does this behaviour occur?
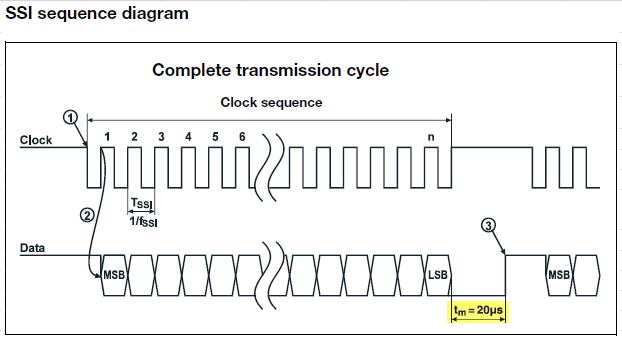
With SSI communication, all data bits are transmitted one after another in a cycle. After that, typically, a pause time (monoflop time tm) has to be observed before the next transmission cycle may start.
The transmission cycle may maximally be restarted in 16kHz steps (62.5µs). Therefore, the pause time will not be observed with any baud rate. If this is the case, communication freezes and the above-described behaviour occurs.
Which products are affected?
i950 servo inverter
Short-term measures:
Calculate the appropriate baud rate by means of the attached Excel tool. The selected value should be as high as possible, especially, if the SSI encoder is to be used as a motor encoder.
Evaluation/recommendations:
The behaviour should not be considered as a restriction. You only have to take into account that an appropriate baud rate has to be parameterised.
The described behaviour makes usability more difficult. You have to calculate which baud rates may be set. However, in this way, the software always allows you to select the maximum possible baud rate. This would not be the case when setting the repetition rate for usability reasons to the lowest value in order to reliably observe the pause time.