9400 Servo PLC from firmware version 05.00.10.00
Response of the new version?
The deceleration time is maintained.
Which products are affected?
9400 HighLine in versions 04.00.xx.xx to 10.00.15.00
9400 Servo PLC in versions 02.00.xx.xx to 04.00.15.00
What happens?
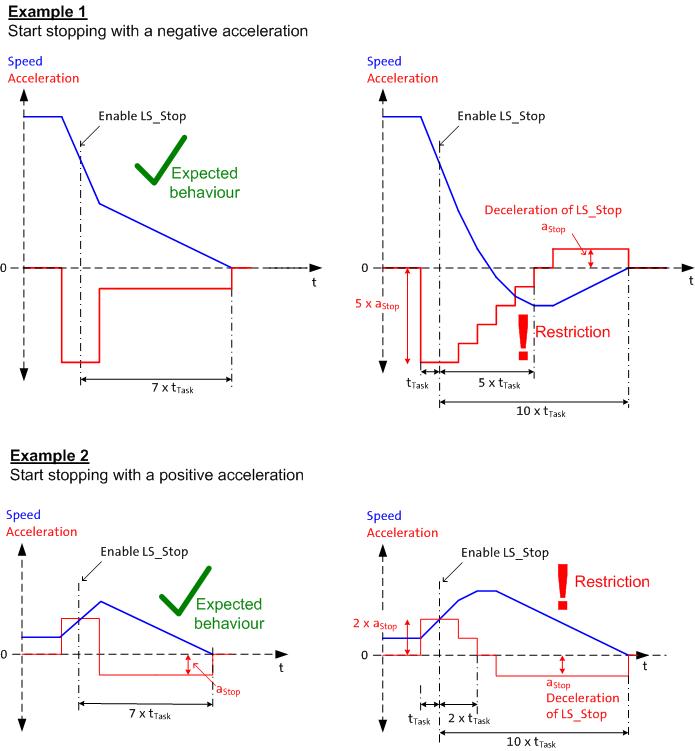
Stopping with linear ramps (S-ramp time = 0s) via the basic function LS_Stop takes longer than expected. The drive is still accelerated or even reverses.
The deceleration of the stop is not established within one task cycle, as expected.
When does the problem occur?
The following conditions must be met at the same time:
1. A profile-generating basic function (LS_Positioner, LS_Homing or LS_ManualJog) is disabled (input bEnable=FALSE) while the drive is accelerated or decelerated. This decelerates the drive to standstill via the profile parameters of LS_Stop.
2. The S-ramp time of LS_Stop is zero (C2611=0s).
3. The impact on the movement only becomes obvious if the acceleration at the start of LS_Stop is considerably greater in value than the stop deceleration
Error cause:
With each call of the application task, the acceleration / deceleration at the start of LS_Stop is reduced by a constant value. The amount of this value corresponds to the actual deceleration of LS_Stop. This means that the duration of the change-over from the starting acceleration and the deceleration of LS_Stop is determined by the ration of the starting acceleration and the deceleration of LS_Stop.
Example: If the starting acceleration is 5 times as high as the deceleration of LS_Stop, it takes 5ms until the starting acceleration is reduced (precondition: the interval of the application task is 1ms).
Condition 1 'Disabling of LS_ManualJog from the deceleration' may be met unexpectedly if only a boolean signal (MAN.bEnable = MAN_bJogPositive OR MAN_bJogNegative) is used for enable of manual jog and the preselection of the direction. In this case, the drive is braked with the deceleration of LS_ManualJog, e.g. with MAN_bEnable=MAN_bJogPositive=TRUE/FALSE for one task cycle, and then change-over to the deceleration of LS_Stop takes place.
The drive may reverse if the starting acceleration is negative at a low speed and has a higher value than the deceleration of LS_Stop. In this case, the change-over may take so long that the starting deceleration is not reduced at zero speed yet. Then the drive might possibly accelerate in the opposite direction of rotation. The higher the speed at the start of the stop, the more time remains for the reduction of the starting acceleration. The probability of reversing is reduced.
Diagnostics options?
Recording of the setpoint acceleration FDB_dnSetAcc_x and the setpoint speed FDB_dnSetSpeed_s by means of the Engineer oscilloscope. When stopped with linear ramps (C2611=0s) with the rising edge at STP_bStopActive, the setpoint acceleration should skip to the deceleration of LS_Stop. If a reduction of the acceleration or a build-up of the deceleration is observed here, we are dealing with the restriction.
Short-term measures/recommendations?
The S-ramp time during stop should be parameterised C2611≥2ms. Then the response does not occur.
Evaluation:
The deceleration time for LS_Stop becomes longer than expected. The drive may rotate in an unexpected direction. The speed and the distance covered during the acceleration / deceleration change-over are determined by the ratio of the acceleration at the start of 'Stopping' and the deceleration value of LS_Stop. The drive can become considerably faster than before. In the case of limited travel ranges, the limit positions can be reached. The response is not necessarily detected during commissioning. Stopping the drive via LS_Stop is not often executed under normal operating conditions. Only occasionally the acceleration at the start of stop is much greater than the deceleration of LS_Stop.