Which products are affected?
ECSxP Posi & Shaft as of V1.3
Function extension
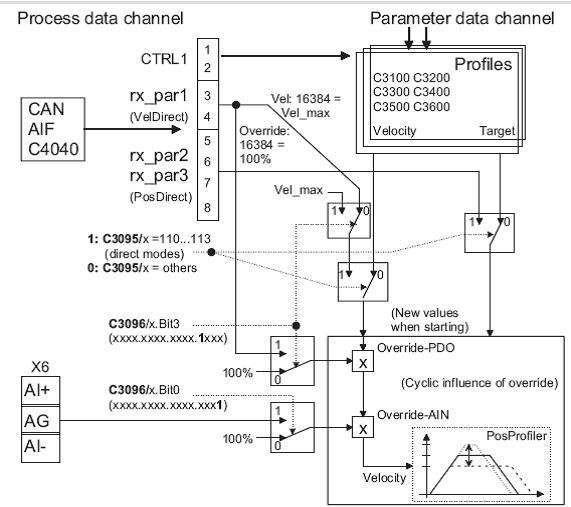
In addition to the override function already available via the analog input (Override-AIN) we have now implemented the override function via the process data channel of the control interface (Override-PDO).
In principle both override functions act in the same way. They are activated via the codes C3096/x 'Profile function'. Each of the 15 positioning profiles is assigned with a subcode of C3096/x. As a result, the override function can individually be activated for every profile. The Override-PDO is activated via the new bit03 of code C3096/x (see diagram above). The bits are counted beginning with 0.
If both override functions are activated at the same time they are both effective in the form of a series connection (multiplicative).
If one override is deactivated this has the same consequences as a 100% override.
The override values are always processed as absolute value. The sign does not determine the direction.
The
Override-AIN via the analog input (C3096/x.Bit00 = 1) can as usually be activated in all positioning modes even in case of direct positioning. Scaling: 10V = 16384 = 100 %.
Effective speed = Profile speed x Override-AIN [%].
Override-PDO
Basic effect:
The newly implemented Override-PDO (C3096/x.Bit03 = 1) is passed on via the PDO-data word 'rx_par1' in the scaling (16384 = 100 %).
Effective speed = Profile speed x Override-PDO [%].
This relation applies to all positioning modes except for 'Direct positioning' modes (C3095= 110...113) in case of which the data word 'rx_par1' is usually already used for selecting the speed (VelDirect).
Therefore the following functionality is valid for the direct modes now (compatibility with the previous versions ensured):
Direct positioning without Override-PDO (C3096/x.Bit03 = 0):
As before the PDO data word 'rx_par1' is interpreted as set value (VelDirect) for the profile speed.
VelDirect is accepted once when the profile is started.
Direct positioning with Override-PDO (C3096/x.Bit03 = 1):
The PDO data word 'rx_par1' is now interpreted as Override-PDO.
It is accepted and becomes effective cyclically. This is also the case during the positioning process.
In this case the profile speed is defined firmly with (Vel-max) = 100% = 16384, see diagram.
Effective profile speed = (Vel-max) x Override-PDO [%].
'Constant traversing (direct)' with Override-PDO:
As special feature of the positioning profile the sign of the PDO data word 'rx_par1' is evaluated as selection for the direction of rotation when the 'Constant traversing (direct)' positioning profile is started. The override influence itself refers to the absolute values.