TA SyncAndCorrection: Einstellung der Laufzeitkompensation in 0x500A, 0x500B
Frage: Wie lässt sich eine Totzeitkompensation bei dem Servo-Inverter i950 BS/ES mit der TA Sync And Correction (0x4000:0 = [41]) realisieren?
Antwort:
Die durch den Geber übermittelten Ist-Werte sind in der Encoder-Achse nach der Signalübertragung totzeitbehaftet. Um diese Totzeit zu kompensieren gibt es die Möglichkeit, die von der Encoder-Achse bereitgestellten Ist-Werte zu extrapolieren. Die Totzeitkompensation kann im Subindex 67 aktiviert werden. Bei einer Master-Slave-Kopplung in einem als (EtherCAT-)Master eingesetzten Servoumrichter i950 besteht weiterhin die Möglichkeit, den für den Master generierten Sollwert zu verzögern: Mit Subindex 67 = 1 wird eine positions- oder geschwindigkeitsgenaue Synchronisation zu den angeschlossenen Slave-Achsen erreicht.
Parameter
Wirksamkeit der Totzeitkompensation bei Master-Slave-Kopplungen (Master-Sollwerte als Leitwertquelle)
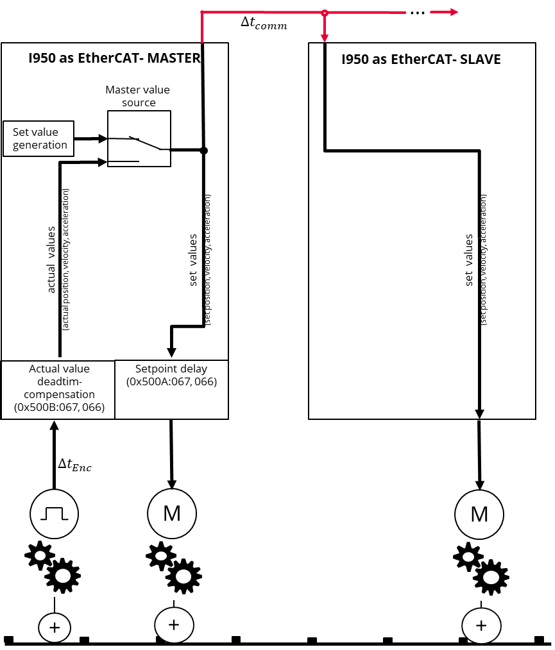
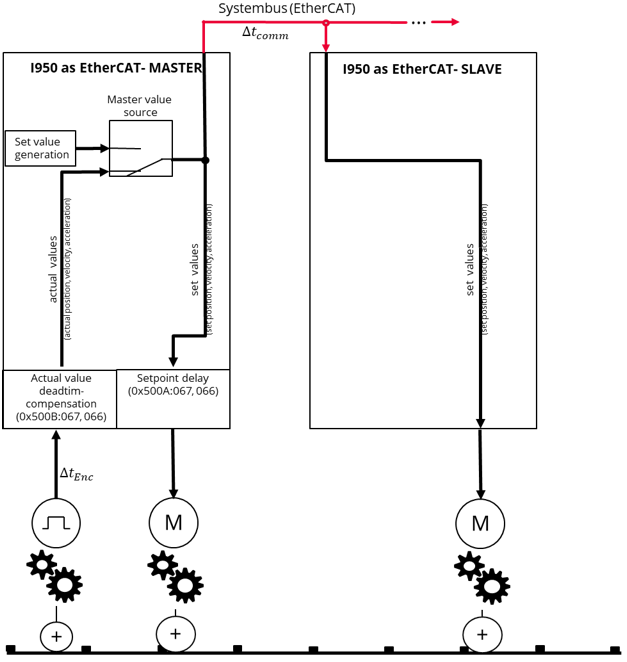
In der nachfolgenden Abbildung ist eine Master-Slave-Kopplung mit einer Master-Achse als Leitwertquelle dargestellt. Die Sollwerte des Master sind erst nach der EtherCAT-Signallaufzeit (Δtcomm) im Slave wirksam. Die Sollwerte des Slaves eilen somit denen des Masters um Δtcomm nach. Damit in beiden Antrieben zum selben Zeitpunkt dieselben Sollwerte wirksam sind, muss die Signallaufzeit Δtcomm kompensiert werden (0x500A:067, 0x500A:068).
Master-Slave-Kopplung (Master-Achse als Leitwertquelle)
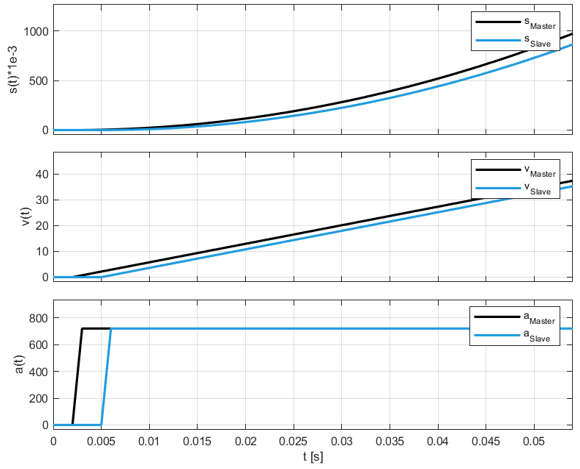
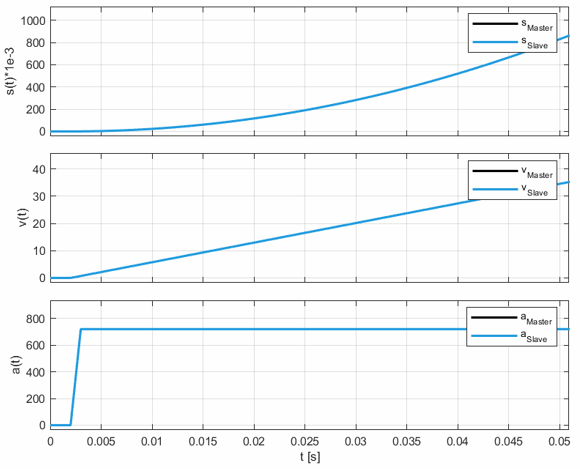
Die nachfolgenden Signalverläufe zeigen die Master-Slave-Sollwerte ohne und mit aktiver Totzeitkompensation (Modus 1: Automatisch für Sollwerte ) während einer Beschleunigungsphase.
a)
b)
Signalverläufe ohne (a)) und mit (b)) aktiver Totzeitkompensation
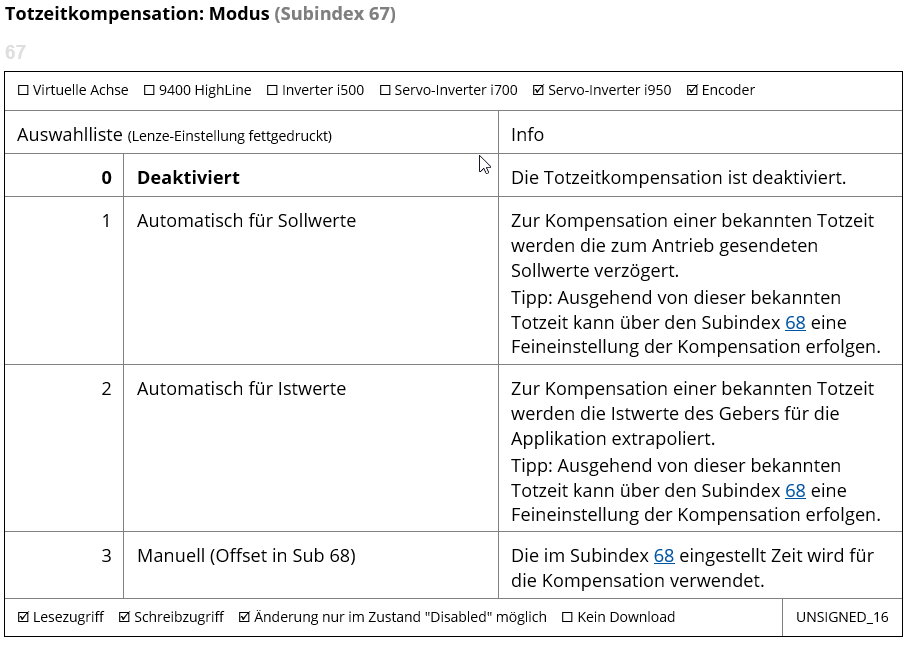
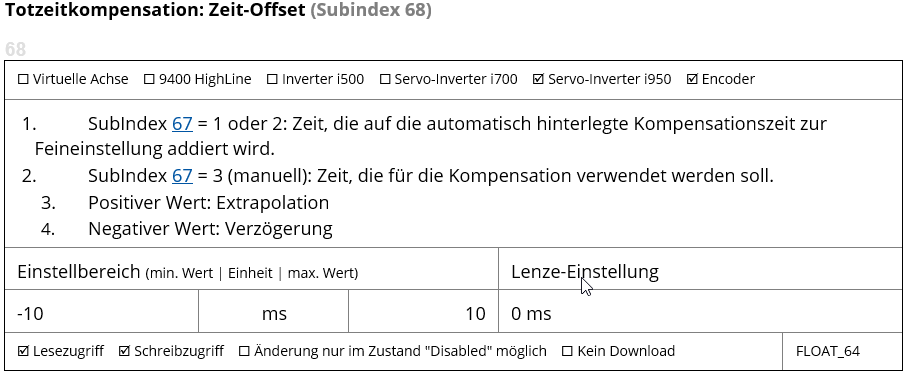
Im Modus 1 (Automatisch für Sollwerte) werden die Sollwerte um eine vorgegebene Zeit von 3ms verzögert an die Master-Achse übergeben. Falls notwendig kann die Kompensation über den Subindex 68 noch feinabgestimmt werden. Positive Werte: Weitere Verzögerung der Sollwerte des Masters (3ms+0x500A:068) Negative Werte: Geringere Verzögerung der Sollwerte des Masters (3ms-0x500A:068) Im Modus 3 (Manuell) kann die zu kompensierende Zeit im 0x500A:068 manuell vorgegeben werden.
Wirksamkeit der Totzeitkompensation bei Master-Slave-Kopplungen (Encoder als Leitwertquelle)
In der nachfolgenden Abbildung ist eine Master-Slave-Kopplung mit einem Encoder als Leitwertquelle dargestellt.
Master-Slave-Kopplung (Encoder-Achse als Leitwertquelle)
Die Istwerte des Encoders sind erst nach einer Signallaufzeit ΔtEnc+2ms PLC-Takt in der Achse des EtherCAT_Masters wirksam. Wird dieser Leitwert an weitere Slaves übertragen, ist dieser Wert erst nach ΔtEnc+2ms PLC-Takt+Δtcomm in den Slave-Achsen wirksam. Damit in beiden Antrieben zum selben Zeitpunkt dieselben Sollwerte wirksam sind, müssen die Encoder-Istwerte um die maximale Signallaufzeit extrapoliert werden (0x500B:067 = 3, 0x500B:068 = ΔtEnc+2ms PLC-Takt+Δtcomm).
Desweitern müssen die Sollwerte der Master-Achse, analog zum Vorgehen im vorherigen Abschnitt, um die Signallaufzeit Δtcomm verzögert werden. (0x500A:067 =2).