Frage:
Ruck-Begrenzung oder Mittelwert-Filterung:
Welches Verfahren zur Vergleichmäßigung des Verlaufes eines Positions-Sollwertes ist in Hinsicht auf das Positionier-Verhalten und die erreichbare Antriebs-Performance besser geeignet?
Antwort:
Es kommt darauf an! Beide Filter-Verfahren haben ihre Vor- und Nachteile.
Beide Verfahren zielen darauf ab, sprunghafte Änderungen der Beschleunigung/Verzögerung zu vermeiden. Sprunghafte Änderungen erzeugen immer ein breites Spektrum an Frequenzen (Stichwort: Fourier). Die individuelle Eigenfrequenz der Maschine wird somit auch dabei sein und das ganze System wird zum Schwingen mit der Eigenfrequenz angeregt.
Ein Filter-Verfahren ist dann besonders effektiv, wenn möglichst nur die Eigenfrequenz der Maschine aus dem Frequenz-Spektrum herausgefiltert, bzw. bedämpft wird.
Ruck-Begrenzung:
Einstellung: Ruck-Begrenzung (Jerk
max) =
𝑎𝑚𝑎𝑥 * f0 | [m/s³] = [m/s²] [1/s]
- f0 : Eigenfrequenz der Maschine
- amax : Max. erreichte Beschleunigung/Verzögerung während der jeweiligen Positionier-Bewegung
Vorteile:
- Ziel- und Überschleif-Positionen werden exakt erreicht.
- Die Sollwert-Generierung verursacht keinen zeitlichen Verzug.
- Das Gleiche trifft für Synchron-Bewegungen mehrerer Achsen zu.
Nachteile:
- Das Frequenzspektrum verschiebt sich bei Bewegungen über kurze Distanzen, wenn im Fahrprofil nicht die volle Beschleunigung amax erreicht wird (sog. Dreiecksbetrieb).
- Die Eigenfrequenz f0 der Maschine wird entsprechend weniger bedämpft und das Auftreten von Schwingungen kann zunehmen.
- Zur Vermeidung der durch den Dreiecksbetrieb verursachten Anregung von Schwingungen, muss die Ruck-Begrenzung angepasst werden, siehe Formel.
Mittelwert-Filter:
Einstellung: Mittelwertfilter-Zeit (T
Filter) =
1 / f0 | [s] = 1 / [1/s]
- f0: Eigenfrequenz der Maschine
Vorteile:
- Einfach parametrierbar, nur Abstimmung auf die Eigenfrequenz f0 der Maschine erforderlich.
- Parametrierung nicht abhängig vom Beschleunigungs-Verlauf der jeweiligen Positionier-Bewegung.
Nachteile:
- Die Bewegung findet durch den Einfluss des Filters zeitlich versetzt statt. Erst nach Ablauf der Dauer einer Filterzeit wird die Zielposition erreicht.
-
Bei überschliffenen Bewegungen (Positionierprofil mit Endgeschwindigkeit) werden die vorgegebenen Positionen nicht genau getroffen.
- Synchron-Bewegungen mehrerer Achsen sind nur bedingt möglich, weil die Verläufe von Position und Geschwindigkeit nicht absolut berechnet werden, sondern sich durch das Filtern ergeben. Bei solchen Anwendungen sind die gleichen Filtereinstellungen zu verwenden.
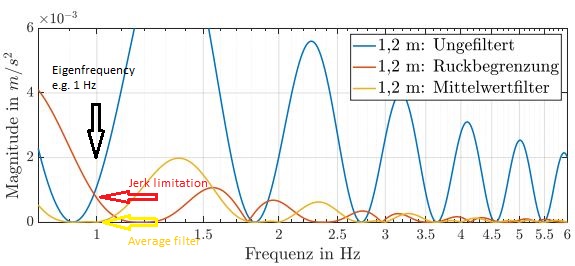
Vergleich der beiden Verfahren am Beispiel einer Maschine mit einer Eigenfrequenz von 1 Hz:
- Mit Mittelwertfilter bleibt im Dreiecksbetrieb (amax wird nicht erreicht) die Schwingungs-anregende Amplitude für die Eigenfrequenz von 1 Hz weiterhin bei Null.
- Mit Ruck-Begrenzung stellt sich im Dreiecksbetrieb eine deutliche Amplitude bei 1 Hz ein.
Die Amplitude liegt im Beispiel fast so hoch, wie im ungefilterten Fall (blaue Kurve).
Abbildung: Abb 6 aus White Paper mit Ergänzungen
Stichwörter: Reglereinstellung, Regeleigenschaften, Performance, Stabilitätsgrenze, Schwingungsanregung