Positionier-Verhalten von CiA402-Achsen: Aufgrund der Interpolation ist der Einfluss der EtherCAT-Zykluszeit sehr gering
Frage: Controller-based System:
Wie wirkt sich die Einstellung einer längeren EtherCAT-Zykluszeit auf das Positionier-Verhalten der CiA402-Achsen aus?
Antwort:
Eine längere EtherCAT-Zykluszeit wirkt sich nicht signifikant auf das Positioner-Verhalten und die Regelgüte der Maschine aus.
Diese Aussage gilt für folgende Antriebskonfigurationen:
Regelkreise (Position, Drehzahl, Drehmonent) sind innerhalb des Antriebsreglers geschlossen. Wenn also der Antriebsregler im CiA-Betriebsmodus "Cyclic Syncronous Position" (csp) betrieben wird und die Rückführung, sowie die Bildung der Regelabweichung (Soll-Ist-Vergleich) im Antriebsregler erfolgen.
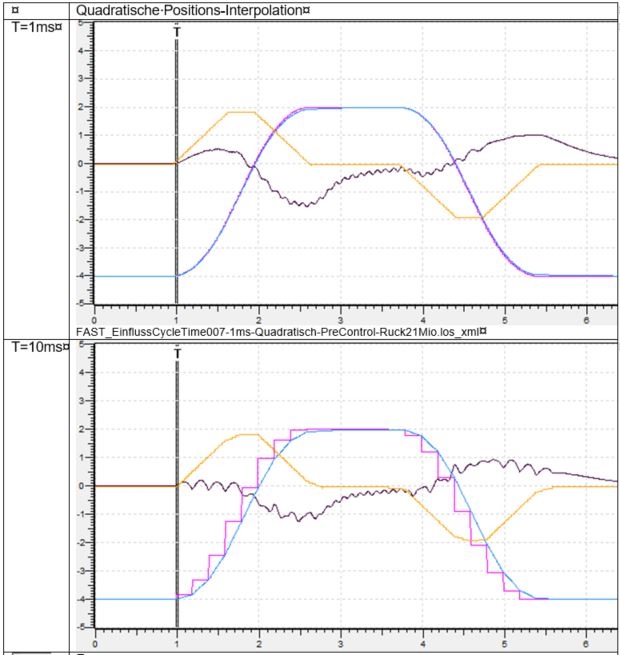
Vergleich der Signalverläufe für EtherCAT-Zyklus = 1 ms und EtherCAT-Zyklus = 10 ms: --> Der Schleppfehler-Verlauf (dunkelfarbige Linie in der Mitte) dient als Indikator für das Antriebsverhalten.
-->Beide Verläufe unterscheiden sich kaum, obwohl die per EtherCAT vorgegebene Soll-Position (pink) bei 10 ms grobe Stufen aufweist.
Hintergrund: Die per EtherCAT mit langer Zykluszeit vorgegebenen "grob-stufigen" Sollwertverläufe für Position, Drehzahl-Vorsteuerung und ggf. auch Drehmoment-Vorsteuerung werden im Antriebsregler über eine Interpolations-Funktion auf die kurzen Zykluszeiten der internen Regelkreise angepasst. Die Sollwertverläufe am Eingang der Regler sind somit sehr "fein-stufig".
Die o.g. Aussagen gelten nicht für Konfigurationen bei denen ein überlagerter, über die Steuerung geschlossener Regelkreis vorhanden ist. In solchen Fällen liegt die EtherCAT-Übertragung innerhalb des Regelkreises und hat somit natürlich deutliche Auswirkungen auf das Antriebsverhalten.