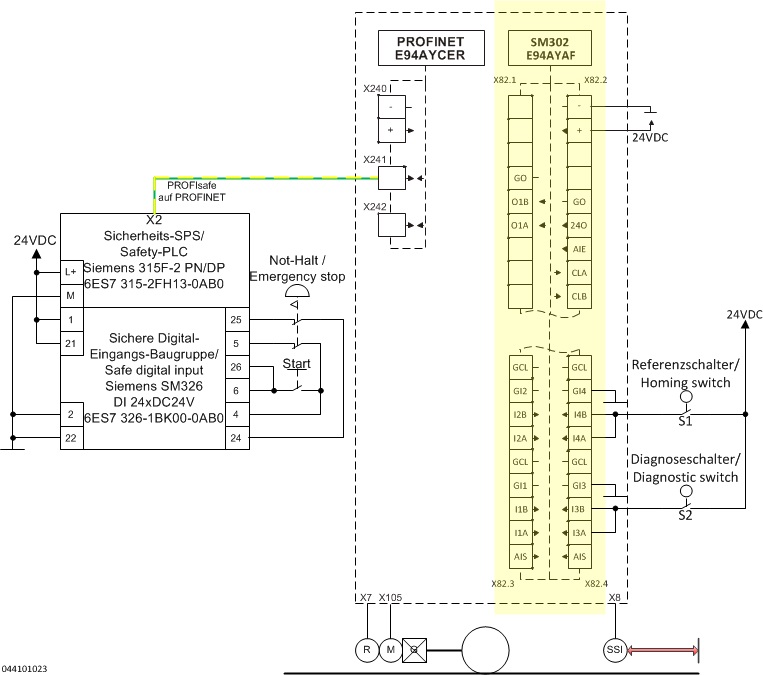
Funktion:
Not-Halt: Bei Betätigung des Not-Halt-Tasters an den sicheren Eingängen der Sicherheits-SPS wird der sichere Stopp 1 mit einer Bremszeit von 1 500 ms aktiviert. Der Verlauf der Bremsrampe wird durch das SM302 überwacht. Bei Betätigung des Reset-/ Start-Tasters an den sicheren Eingängen der Sicherheits-SPS werden der Not-Halt und eventuelle Fehler quittiert.
Normierung der Positionswerte: Über eine entsprechende Parametrierung des Lastgeber-Getriebefaktors und des Getriebefaktors im SM302, sind die absoluten Positionswerte im SM302 mit einem Normierungsfaktor von 100 versehen, d.h. 1 unit (mm) = 100 Inkr. Die Vorgehensweise ist im AKB-Beitrag 201700233 beschrie-ben.
Referenzierung: Nach Einschalten der Anlage muss die Bewegungs-Applikation nicht referenziert werden, da ein absolutes Wegmesssystem verwendet wird. Das sichere Referenzieren erfolgt auf den Positionsschalter S1 in negativer Richtung. Anschließend wird der Positionsschalter in positiver Richtung wieder verlassen. Solange im SM302 die sichere Referenz nicht vorhanden ist, kann nur mit SLS1 (=1000 mm / s) und in negativer Richtung verfahren werden. Das Starten der sicheren Referenzierung erfolgt auf den Positionsschalter S1 in negativer Richtung. Das Setzen der sicheren Referenz erfolgt beim Verlassen des Positionsschalters in positiver Richtung. Dabei wird der Motor innerhalb des Toleranzfensters der SDI-Funktion in die gesperrte Richtung verfahren (max. 32768 Ink. = 50 mm). Die Referenzierbewegung erfolgt über zwei Positionierprofile. Die sichere Referenzposition wird netzausfallsicher gespeichert, sodass beim Einschalten nur die Mini-Referenzfahrt durchgeführt wird. Wird das Fahrzeug im spannungslosen Zustand mehr als das tolerierte Fenster von 1 000 Ink. (=10 mm) bewegt, wird dies beim Einschalten erkannt. Dann ist eine Referenzfahrt erforderlich.
Sichere Positionsüberwachung: Sobald die sichere Referenz vorhanden ist, ist die PDSS-Funktion automatisch aktiviert. In den Endbereichen des Bewegungsbereiches kann mit SCS verfahren werden.
Bewegungsfunktion: Das Fahrzeug positioniert im Automatikbetrieb mit 4 000 mm / s (=2 400 rpm) zwischen 3 200 mm (=320 000 Ink.) und 80 800 mm (=8 080 000 Ink.) hin und her. Die Beschleunigung und Verzögerung ist 2 000 mm / s2 (=1 200 rpm / s). Im Normalbetrieb wird nicht in die SCS-Bereiche hineinpositioniert. Die SCS-Bereiche können mit 150 mm / s (=90 rpm) in Manual Jog befahren werden.
Allgemein: Auftretender Schlupf von max. 10 mm pro Motorumdrehung (=1 000 Ink.) wird auch in den Endbereichen kompensiert. Daher wird die Toleranz für den Positionsvergleich ebenfalls auf 1 000 Ink. parametriert. Mit Hilfe der beiden Diagnosemarken, die den Positionsschalter S2 betätigen, wird der korrekte Positionswert des SSI-Gebers geprüft, bevor das Fahrzeug in die Endbereiche des Fahrwegs einfährt. Die Diagnosemarken haben eine Breite von je 50 mm. Daraus resultiert bei Maximalgeschwindigkeit (4167 mm / s) eine Betätigungsdauer von 12 ms. Diese Zeit ist für eine sichere Erfassung ausreichend lang. Die Mittelpunkte von Referenzschalter S1 und Diagnoseschalter S2 markieren jeweils den Punkt des aktuellen Positionswertes. Ein eventueller Offset muss im SSI-Geber oder der 9400-TA vorgegeben werden.
Sicherheitshinweis / Haftungsausschluss
Die Safety Applikations- und Parametrierhinweise sind Beispiele für mögliche Teilfunktionen in Maschinen.Die Angabe des T10D-Wertes gemäß DIN EN ISO 13849-1, Anhang C.4.2 erfolgt nur bei Vorliegen eines B10D–Wertes und bei einer Betriebszeit von weniger als 20 Jahren. Die Inbetriebnahme ist solange untersagt, bis festgestellt wurde, dass die Maschine den Bestimmungen der relevanten EG-Richtlinien / nationalen Gesetze entspricht. Die Sicherheitshinweise der technischen Dokumentationen sind zu beachten. Die Nutzung der Beispiele entbindet den Anwender nicht von einer sorgfältigen Projektierung. Für mögliche Schäden und Folgeschäden übernimmt Lenze, soweit rechtlich zulässig, keine Haftung. Copyright 2019 Lenze Automation GmbH