Behoben ab:
9400 HighLine ab der Firmware Version 12.00.18.00
9400 Servo PLC ab der Firmware Version 06.00.18.00
Verhalten der neuen Version
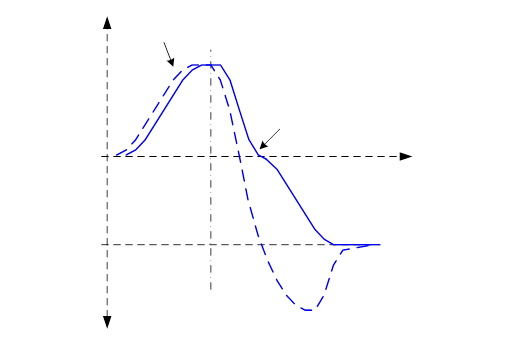
Bei dem Profilübergang durch den Richtungswechsel wird nun die vorhandene Beschleunigung im 0-Durchgang der Geschwindigkeit mit dem größten Ruck der beiden beteiligten Profile abgebaut. Damit wird eine Drehzahlüberhöhung wirksam unterbunden und der parametrierte Ruck des Handfahrens nicht überschritten.
Betrifft welche Produkte?
9400 HighLine: 10.00.xx.00 ≤ FW-Version ≤ 11.00.10.00
9400 ServoPLC: 04.00.xx.00 ≤ FW-Version ≤ 05.00.10.00
Wie sieht die Reaktion aus?
Bei Wechsel der Handfahrrichtung während aktiver Handfahr-Bewegung wird bei der Bewegung mit in die neue Richtung die eingestellte Handfahrgeschwindigkeit überschritten.
Wann tritt das Problem auf?
Das Verhalten tritt auf, wenn folgende Bedingungen zusammen erfüllt sind:
· Handfahr-Verschliffzeit C2624>0ms
· Während der Bewegung wird ein Wechsel der Drehrichtung angefordert.
· Bei Wechsel von positive auf negative Richtung ist das Verhältnis der Parameter Verzögerung/Beschleunigung > 2
ODER
Bei Wechsel von negative auf positive Richtung ist das Verhältnis der Parameter Beschleunigung/Verzögerung > 2
Folgende Faktoren verstärken die Ausprägung der Geschwindigkeitsüberhöhung:
- Kleiner Ruck resultierend aus den Parametern Beschleunigung und Verschliffzeit.
Die Überhöhung resultiert aus dem Abbau einer Verzögerung. Mit großer Verschliffzeit dauert der Abbau entsprechend lange.
- Große Verhältnisse zwischen Beschleunigung und Verzögerung.
- Kleine Handfahr-Geschwindigkeiten
Damit steht entsprechend wenig Zeit für den Abbau der Verzögerung zur Verfügung und ein Überschreiten der Zielgeschwindigkeit wird wahrscheinlicher und prozentual größer.
Bis zu der FW Version 9.x beim 9400 HighLine und 4.x bei der 9400 Servo PLC wurde das Verhalten von einer Funktionseinschränkung überdeckt. Die Geschwindigkeitsüberhöhung kann also gerade nach einem Gerätetausch mit FW upgrade auftreten.
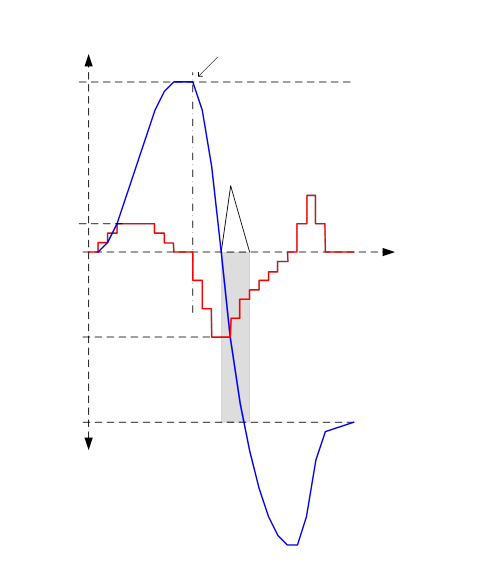
Beispiel:Nach dem Richtungswechsel von positiv auf negativ wird zunächst mit dem Verhältnis Verzögerung/Verschliffzeit die Sollverzögerung aufgebaut bis Drehzahl Null erreicht wird. Dann wird die Verzögerung mit dem Verhältnis 2xBeschleunigung/Verschliffzeit (period of 2x jerkup) wieder abgebaut bis die eigentliche Handfahrgeschwindigkeit überschritten wird. Danach wirkt der Ruck, der aus den Beschleunigungsparametern resultiert Beschleunigung/Verschliffzeit. Nach dem nächsten Nulldurchgang der Geschwindigkeit wirken wieder die Verzögerungsparameter.
 Diagnosemöglichkeiten?
Diagnosemöglichkeiten? Wenn eine Geschwindigkeitsüberhöhung beobachtet wird, sollte testweise eine Verschliffzeit tjerk=0ms parametriert werden. Verhindert diese Maßnahme die Überhöhung, dann war der Abbau der Verzögerung ursächlich für die Geschwindigkeits-Überhöhung.
Kurzfristige Maßnahmen/Empfehlungen?
Mit einer Aktivierung der Funktion ‚Handfahren mit Schrittbegrenzung‘ durch MAN_bStepMode=TRUE kann sichergestellt werden, dass bei Anforderung eines Richtungswechsels erst in den Stillstand gefahren wird. Erst dann wird eine neue Richtungsanforderung übernommen. Damit tritt das Verhalten nicht mehr auf.
Mit der Einstellung C2625=214748,3647units/s kann dann trotzdem eine Handfahrbewegung ohne Schrittbegrenzung über den gesamten Verfahrbereich erfolgen.
Bewertung:
Die Geschwindigkeitsüberhöhung wird beim Handfahren mit Richtungswechsel nicht erwartet. Der Antrieb kann je nach Ausprägung des Verhaltens deutlich schneller werden als im Handfahrparameter eingestellt. Im worst case greift die Drehzahlsollwert-Begrenzung C909/1+2 im Drehzahlregler (Default +/-175% von C011). Das Verhalten tritt bei durchaus üblicher Einstellung der Handfahrparameter auf.
