9400 Servo PLC ab der Firmware Version 05.00.10.00
Verhalten der neuen Version ?
Die Ablaufzeit wird eingehalten.
Betrifft welche Produkte?
9400 HighLine in den Versionen 04.00.xx.xx bis 10.00.15.00
9400 Servo PLC in den Versionen 02.00.xx.xx bis 04.00.15.00
Wie sieht die Reaktion aus?
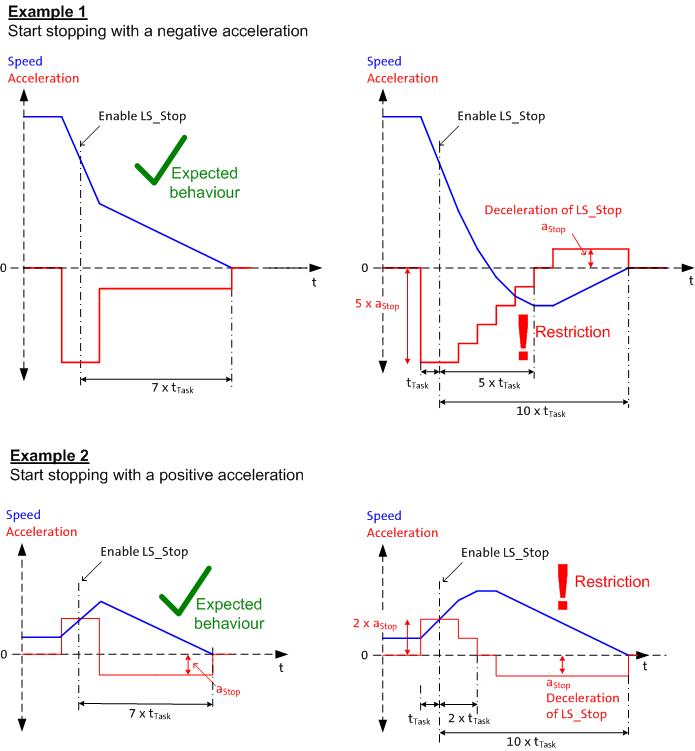
Das Stoppen mit linearen Rampen (Verschliffzeit = 0s) über die Grundfunktion LS_Stop dauert länger als erwartet. Der Antrieb wird noch beschleunigt oder reverisiert sogar.
Die Verzögerung des Normalhaltes wird nicht wie erwartet in einem Taskzyklus aufgebaut.
Wann tritt das Problem auf?
Folgende Bedinungen müssen gleichzeitig erfüllt sein:
1. Eine profilgenerierende Grundfunktion (LS_Positioner, LS_Homing oder LS_ManualJog) wird disabled (Eingang bEnable=FALSE) während der Antrieb beschleunigt oder verzögert wird. Damit wird der Antrieb über die Profilparameter des LS_Stop in den Stillstand verzögert.
2. Die Verschliffzeit des LS_Stop ist Null (C2611=0s).
3. Die Auswirkung auf die Bewegung wird nur deutlich, wenn die Beschleunigung bei Start des LS_Stop im Betrag deutlich größer ist als die Verzögerung im Normalhalt
Fehlerursache:
Die Beschleunigung / Verzögerung bei Start des LS_Stop wird mit jedem Aufruf der Application-Task um eine festen Wert abgebaut. Dieser Wert entspricht im Betrag der eigentlichen Verzögerug des LS_Stop. Die Dauer für den Übergang aus der Startbeschleunigung zur Verzögerung des LS_Stop wird also bestimmt durch das Verhältnis der Startbeschleunigung zur Verzögerung des LS_Stop.
Beispiel: Wenn die Startbeschleunigung 5mal so groß ist wie die Verzögerung des LS_Stop, dann dauert es 5ms bis die Startbeschleunigung abgebaut ist (Voraussetzung: der Intervall der Application-Task beträgt 1ms).
Die Bedingung 1. 'Disablen des LS_ManualJog aus der Verzögerung herraus' kann unerwartet erfüllt sein, wenn für die Freigabe des Handfahrens und die Richtungsvorwahl nur ein boolesches Signal verwendet wird (MAN.bEnable = MAN_bJogPositive OR MAN_bJogNegative). In diesem Fall wird z.B. mit MAN_bEnable=MAN_bJogPositive=TRUE/FALSE für einen Taskzyklus mit der Verzögerung des LS_ManualJog abgebremst und dann erfolgt der Übergang auf die Verzögerung des LS_Stop.
Zum Reversieren des Antriebes kann es dann kommen, wenn bei kleiner Drehzahl die Startbeschleunigung negativ und im Betrag viel größer als die Verzögerung des LS_Stop. In diesem Fall kann der Übergang so lange dauern, dass die Startverzögerung bei Drehzahl Null noch nicht abgebaut ist. Damit beschleunigt der Antrieb ggf. noch in entgegengesetzte Drehrichtung. Umso höher die Drehzahl bei Start des Normalhaltes umso mehr Zeit bleibt für den Abbau der Startbeschleunigung. Ein Reversieren wird unwahrscheinlicher.
 Diagnosemöglichkeiten?
Diagnosemöglichkeiten? Aufzeichnung der Sollbeschleunigung FDB_dnSetAcc_x und der Solldrehzahl FDB_dnSetSpeed_s mit dem Engineer Oszilloskop. Die Sollbeschleunigung müsste bei einem Stoppen mit linearen Rampen (C2611=0s) mit der steigenden Flanke an STP_bStopActive auf die Verzögerung vom LS_Stop springen. Ist hier ein Abbau der Beschleunigung bzw. Aufbau der Verzögerung zu erkennen, dann liegt die Einschränkung vor.
Kurzfristige Maßnahmen/Empfehlungen?
Die Verschliffzeit im Normalhalt sollte C2611≥2ms parametriert sein. Dann tritt das Verhalten nicht auf.
Bewertung:
Die Ablaufzeit beim LS_Stop wird länger als erwartet. Der Antrieb kann in eine nicht erwartete Richtung drehen. Die Drehzahl und der zurückgelegte Weg beim Übergang der Beshleunigung / Verzögerung werden durch das Verhältnis der Beschleunigung bei Start des 'Stopping' und dem Betrag der Verzögerung des LS_Stop bestimmt. Der Antrieb kann deutlich schneller werden als zuvor. Bei begrenzten Fahrbereichen können die Endlagen erreicht werden. Das Verhalten wird nicht unbedingt bei der Inbetriebnahme erkannt. Das Stoppen des Antriebes über den LS_Stop wird betriebsmäßig nicht oft angewendet. Nur sehr selten ist die Beschleunigung bei Start des Normalhaltes viel größer als die Verzögerung des LS_Stop.
