Fixed from: Inverter Drive 8400 TopLine from V14.00.00.00.
Behavior of the new version:
The described overflow is not to be suppressed in the drive controller, but a fault reaction can be generated.
Activating the code number C00431/1 bit 6 generates a fault when the overflow occurs.
An overflow is displayed in the code number C00451/1 bit 6.
Which products are affected?
Inverter Drive 8400 TopLine up to firmware version 12.01.00.00
What happens?
At LS_MultiEncoder, permanently the maximum speed is output. The current position in the MCK is not plausible and increases continuously although a constant value is transferred from the SSI encoder.
When does the problem occur?
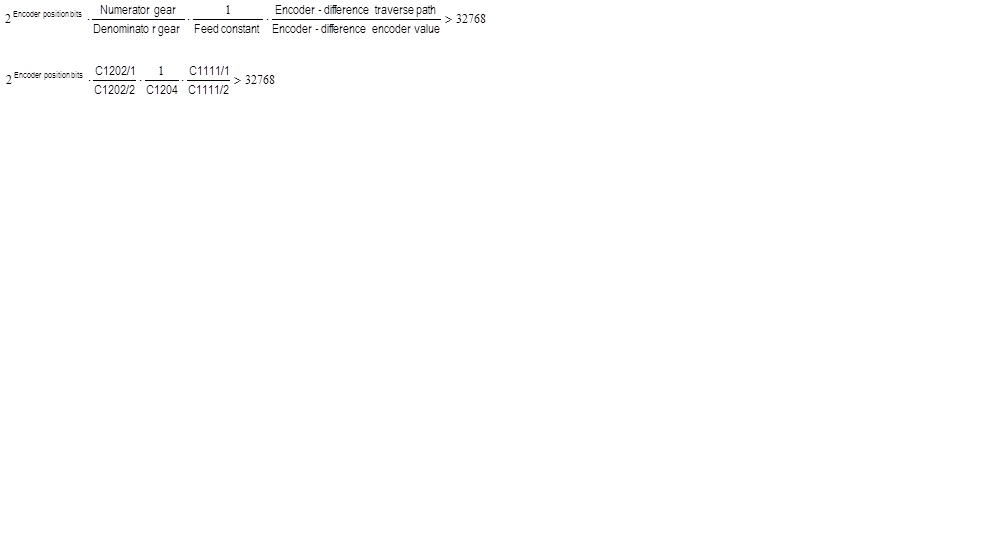
The behaviour occurs if there is a counter overflow in the inverter when the theoretical maximum position of the encoder is calculated.
The overflow is caused if the following condition is met.
Diagnostics options?
nActSpeed_v=32767 permanent
nActSpeed_a=200% permanent
wLowWord and wHighWord reflect a plausible encoder value.
Short-term measures/recommendations?
The encoder resolution (encoder position bits) can be reduced to the number of bits required for the usable travel range, in order to reduce the result of the above-specified formula to values <32768.
Example:
The position in [mm] of a linear SSI encoder can be resolved with a maximum of 25 bits.
Thus the theoretical maximum position of the encoder is
s=2^25mm= 33554432mm=33554m.
The laser, however, can only cover a maximum distance of s=200m. Therefore the usable travel range can never be greater than s=200m.
Thus, the encoder resolution could be reduced to 18 bits (which corresponds to a max. display area of s=2^18mm=262m).
In the particular case, this resolution would be implemented by the setting C426/2=18 (bits single turn). The total data word length of the SSI data C426/1 must be reduced by the same number of bits like C426/2.
Evaluation:
In order to be able to use the encoder, the setting for the encoder resolution must differ from the data sheet in the case of affected applications. For this, the user is not guided by the documentation or the Engineering tool.
The behaviour is typically detected directly when the positions of the position encoder are integrated into the position control loop, since a plausible position is never displayed.