Positioning behaviour of CiA402 axes: Due to interpolation, the influence of the EtherCAT cycle time is very low
Question:
Controller-based system: How does setting a longer EtherCAT cycle time affect the positioning behavior of the CiA402 axes?
Answer:
A longer EtherCAT cycle time has no significant effect on the positioner behavior and the control quality of the machine.
This statement applies to the following drive configurations:
Control loops (position, speed, torque) are closed within the drive controller. Thus, if the drive controller is operated in the CiA operating mode "Cyclic Syncronous Position" (csp) and the feedback, as well as the formation of the control deviation (setpoint/actual value comparison) is performed in the drive controller.
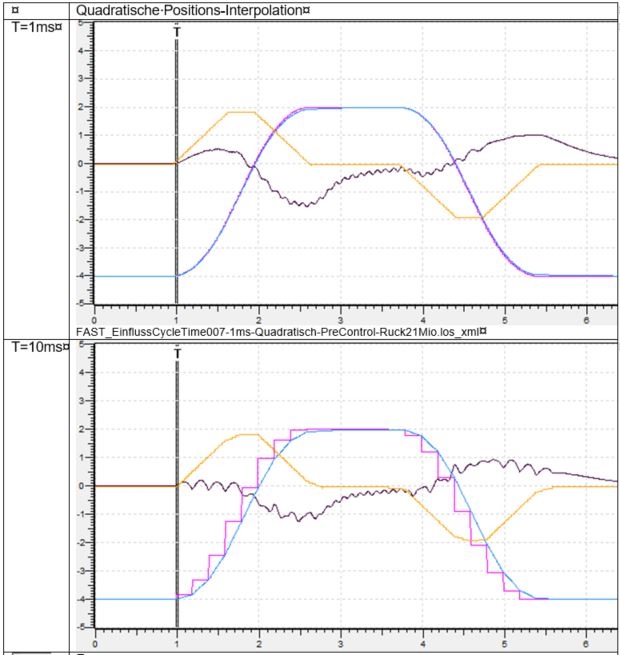
Comparison of the signal characteristics for EtherCAT cycle = 1 ms and EtherCAT cycle = 10 ms: --> The tracking error curve (dark colored line in the middle) serves as an indicator for the drive behavior
--> Both courses hardly differ, although the target position (pink) specified by EtherCAT has coarse steps at 10 ms.
Background:
The "coarse-stepped" setpoint value characteristics for position, speed feedforward and, if necessary, torque feedforward, which are specified via EtherCAT with a long cycle time, are adapted to the short cycle times of the internal control loops in the drive controller via an interpolation function. The setpoint curves at the input of the controllers are thus very "fine-step".
The above statements do not apply to configurations in which a superimposed closed-loop control loop is present via the controller. In such cases, the EtherCAT transfer is within the control loop and thus naturally has significant effects on the drive behavior.