Which products are affected?
LenzeMotionControlV3.lib, LenzeMotionControlV0303.lib, LenzeMotionControlV0304.lib
What happens?
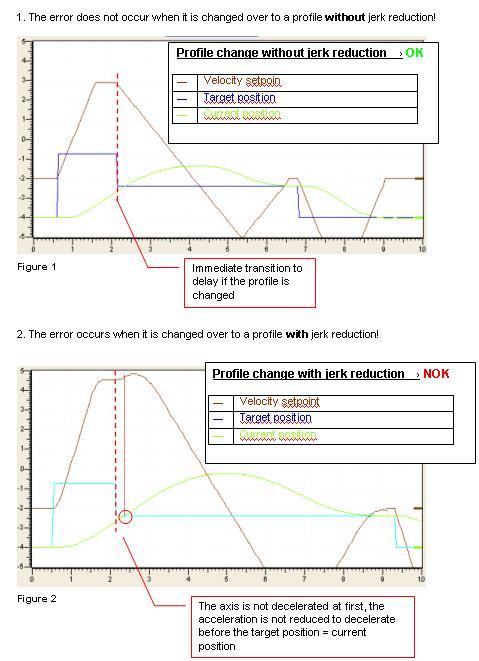
The axis continues to rotate constantly or even accelerates although the distance (new position target minus current position) of the profile activated is not sufficient to approach the target with the deceleration parameterised without reversing. Only if the new target position has been achieved once the acceleration is reduced in order to decelerate the axis and to reverse afterwards. The position of the profile activated is approached correctly but the distance traversed for this purpose is too long since it is reversed too late. The figures at the end of this article illustrate this behaviour.
When does the problem occur?
The following conditions must occur in order to provoke the behaviour:
- The slave profile is generated with jerk reduction (jerk time > 0)
- An active profile generation is replaced by the activation of the slave profile. This may happen for instance in case of the following scenarios: 1. A new profile is passed over explicitly to the profile generator out of the user program. --- 2. TouchProbe positioning with a residual distance > 0. --- 3. In case of homing with an offset to be traversed. However, this applies only if the template positioner is used since here the homing movement is determined by the profile generator. If the function blocks of the library are used L_REF is usually used for homing purposes.
- The residual distance of the slave profile is not sufficient to approach the target with the deceleration set without reversing.
The faulty behaviour is caused by the L_MCProfileGenerator profile generator. Thus it may occur in the positioner templates as well as in the programs which use this function block.
Possible diagnostics?
By means of the Global Drive Oscilloscope the variables for the target position, the current position and the current velocity can be recorded. If due to a profile change a reversing occurs, the profiles recorded can be used to check when the deceleration is activated. The fault has occurred if despite the reversing required the deceleration is not started immediately when the profile is changed but only if the slave position target has been achieved.
Short-term measures/recommendations?
If the jerk reduction has been deactivated for the slave profile (jerk time = 0) the deceleration is activated delayed.
Evaluation:
The reversing of the axis is not caused by this faulty behaviour. Only the distance to be traversed in opposite direction is lengthened. In practical applications this effect is usually not noticed.